Self-similarity Analysis for Motion Capture Cleaning
[Back to the main page]
[See more ecamples: Salsa Dance Locomotion]
Contemporary Dance
Original erroneous motion
Motion has been reconstructed from markers with missing entries due to occlusion using cubic interpolation (Autodesk Motion Builder)
Self-similarity Analysis (our method)
Marker based methods
Comparison to Burke and Lasenby [BL16]
Comparison to Gløersen and Federolf [GF16]
In addition to the comparisons presented in the paper and supplementary video, we compared our method to the method proposed by Gløersen and Federolf [2016]. In this approach, the authors project the incomplete marker data into a basis where it is sparsely represented, apply a coordinate transformation, and then transform it back into the original coordinates to obtain an estimate of the missing marker’s coordinates. The main limitation of this method is that it only fills gaps of incomplete sequences, and cannot treat errors due to marker detachment or mislabeling. Moreover, if gaps occur in several markers of the same body segment at the same time, the method cannot return good estimates since no inferred information from neighboring markers can be retrieved.
The authors publicly share their code and GUI interface. Here we present the results of the method when it was tested using our contemporary and salsa dancing data (see Figure 1 and Video). It can be observed that the reconstructed markers trajectories have discontinuities, generating motion with abrupt changes and anomalies in joint rotations. This is because the proposed algorithm is designed based on the assumption that movements are cyclic or repetitive, while the dancing data are dynamic and heterogenous. We also tried the method on repetitive motions, such as walking and running, and the reconstruction quality was high.
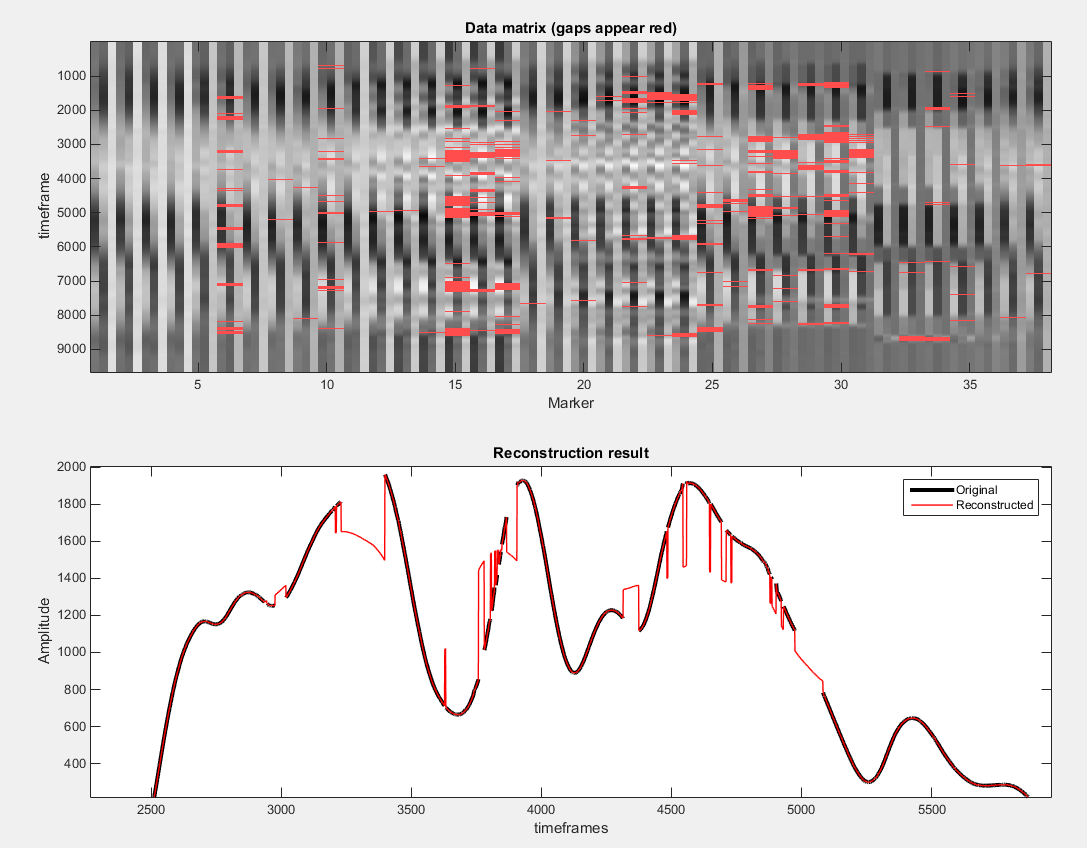
Figure 1:The top image shows the data matrix, where the gaps in marker trajectories are shown in red. The bottom image shows a part of the original marker trajectory with occlusions (shown in black), and the reconstructed marker trajectory (shown in red).
Joint based methods
Comparison to Feng et al. [FJX*15]
Comparison to Holden et al. [HSKJ15]
References
[BL16] BURKE M., LASENBY J.: Estimating missing marker positions using low dimensional kalman smoothing. Journal of Biomechanics 49, 9 (2016), 1854–1858.
[FJX*15] FENG Y., JI M., XIAO J., YANG X., ZHANG J. J., ZHUANG Y., LI X.: Mining spatial-temporal patterns and structural sparsity for human motion data denoising. IEEE Transactions on Cybernetics 45, 12 (Dec 2015), 2693–2706.
[GF16] GLØERSEN Ø., FEDEROLF P.: Predicting missing marker trajectories in human motion data using marker intercorrelations. PLOS ONE 11, 3 (2016), 1–14.
[HSKJ15] HOLDEN D., SAITO J., KOMURA T., JOYCE T.: Learning motion manifolds with convolutional autoencoders. In SIGGRAPH Asia 2015 Technical Briefs (New York, NY, USA, 2015), SA ’15, ACM, pp. 18:1–18:4